clustered_forward_shading
基本概念
cluster shading是将相机的Frustum按x y z切块成cluster,记录每个cluster 受哪些实时光源影响,再对有效的cluster进行光照计算。
痛点
解决tbdr和观察物体有强关联,在深度不连续的地方,会导致开销增大的问题。file:///home/berg/code/junglemanpro/source/_posts/deferred-shading.md
基本步骤
- pre depth,只渲染不透明物体
- 计算保存 有效的cluster
- 根据lighting(pos,range)计算得到lighting bounds,并根据lighting bounds得到每个cluster命中的lighting count
- 遍历所有cluster的lighting count,累加至lighting total,并记录每个cluster在lighting total累加时的总量,记作offset
- 遍历所有lighting,根据lighting bounds遍历其中的有效cluster,累加当前cluster count和总的offset将light index记录在light list中
- 根据offset和lighting count读取cluster光照信息进行光照计算
基本实现
pre depth 此为优化项,搭配ssao msaa食用更美味。
计算保存 有效的cluster
- 点位: 世界坐标系 转换到 相机坐标系 ,由相机坐标系 点位 得到深度信息
vec4 view_pos = ubo_in.view * world_pos_in;
- 将frag_pos.xy view_pos.z转换得到当前点位的分簇 x y z坐标
1
2
3
4
5
6
7uvec3 view_pos_to_grid_coord(vec2 frag_pos, float view_z)
{
vec3 c;
c.xy = (frag_pos-0.5f) / ubo_in.tile_size;
c.z = min(float(GRID_DIM_Z - 1), max(0.f, float(GRID_DIM_Z) * log((-view_z - CAM_NEAR) / (ubo_in.cam_far - CAM_NEAR) + 1.f)));
return uvec3(c);
}- 将当前fragpos的分簇 x y z坐标转化为cluster id
1
2
3
4uint grid_coord_to_grid_idx(uvec3 c)
{
return ubo_in.grid_dim.x * ubo_in.grid_dim.y * c.z + ubo_in.grid_dim.x * c.y + c.x;
}
保存 有效的cluster
1
imageStore(grid_flags, int(grid_idx), uvec4(1, 0, 0, 0));
- tips: gl_FragCoord
当viewport 范围 为(0,0,800,600)时, x, y 的取值范围为(0.5, 0.5, 799.5, 599.5)
计算lighting bounds和cluster命中的lighting count
- 将light pos转化到相机坐标系,根据light range的到最小值和最大值,剔除不在该camera frustum下的lighting,将有效的light pos转化为frag
- grid_light_counts 累加每一个cluster对应的count
记录每个cluster在lighting list中的offset
numgroup x y z 设置每个group的size为16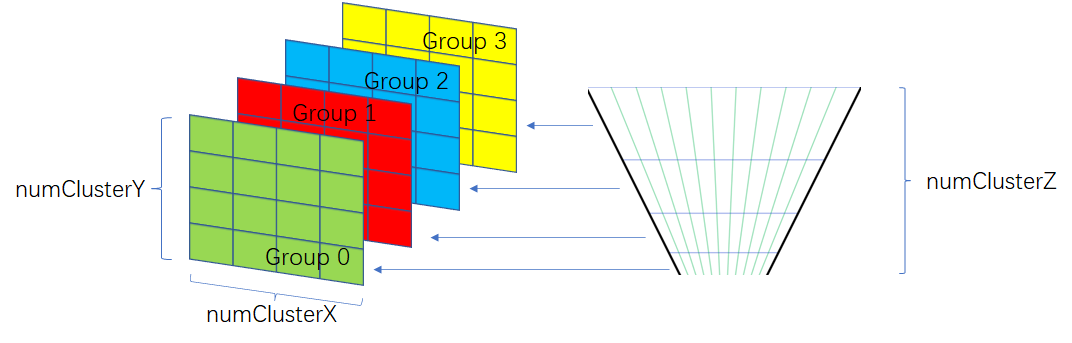
生成光照列表
遍历light bounds, 读取有效的cluster的偏移量,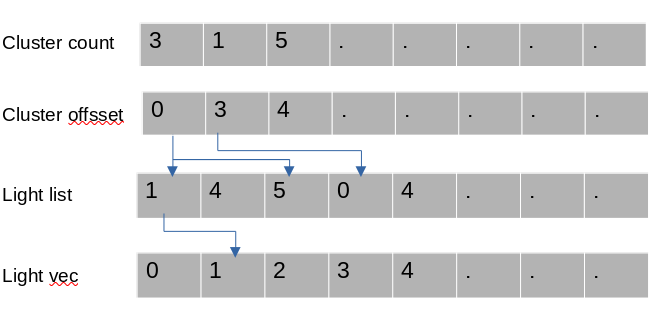
优化方向
- 资源类型:访问具有空间连续性,使用buffer和贴图有更好的cache命中率。随机访问的特性更强使用ubo减少访问贴图采样次数,如light vec。
- 贴图格式:根据实际需求,使用最小的texture格式减少带宽,如uvec2使用uint r16b16或者uint r8b8等。
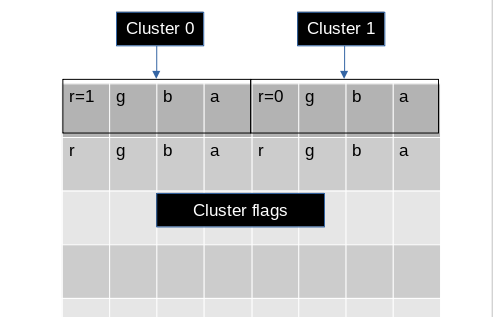
- 是否带阴影的灯光 在第一张表格中进行区分?如果在光源信息中标识是否带阴影会在shader中多引入动态分支,而在第一张表格中区分可以省去此动态分支,但是需要更大的带宽,需要衡量。
clustered_forward_shading
http://example.com/2022/01/15/clustered_forward_shading/